Основной принцип работы системы ESC (Electronic Stability Control) очень простой — подтормаживая отдельные колёса, она влияет на направление движения автомобиля. Особенно наглядно это становится на примере гусеничных транспортных средств, для которых такой манёвр является основным способом поворота (рис.5.2.55).
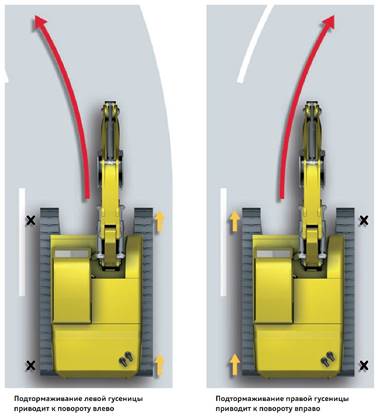
Рисунок 5.2.55 – Поворот гусеничных транспортных средств
Электронная система поддержания курсовой устойчивости ESC с помощью соответствующих датчиков заблаговременно распознаёт приближение критической ситуации. ESC постоянно находится в состоянии готовности. Распознавание критической динамической ситуации базируется на сравнении параметров движения, задаваемых водителем, и фактических параметров движения автомобиля. Когда они начинают различаться, к управлению подключается система ESC. В зависимости от конкретной ситуации ESC может уменьшать крутящий момент двигателя или отменять переключение передачи автоматической коробки передач. После этого ESC стабилизирует автомобиль точно рассчитанным подтормаживанием одного или нескольких колёс.
При недостаточной поворачиваемости вмешательство ESC начинается с управления двигателем, а при избыточной — с тормозной системы. Корректирующее вмешательство продолжается до тех пор, пока нестабильная ситуация не будет устранена, т.е. пока не будут вновь достигнуты номинальные параметры движения.
Подтормаживанием отдельных колёс ESC создаёт разворачивающий момент (относительно вертикальной оси автомобиля) (рис.5.2.56).
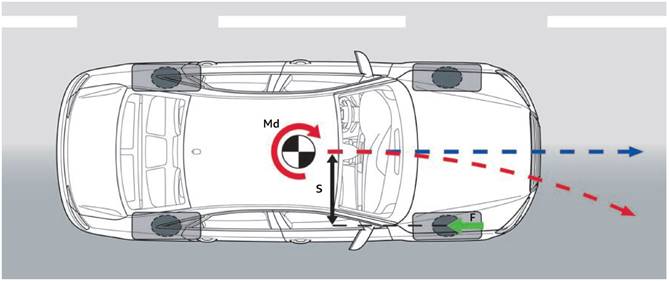
Рисунок 5.2.56 – Воздействие вращающего момента на автомобиль
В показанном примере у автомобиля, движущегося прямо, подтормаживается правое переднее колесо. Действующая в пятне контакта этого колеса тормозная сила F имеет плечо S относительно вертикальной оси, проходящей через центр масс автомобиля. Тем самым эта тормозная сила создаёт вращающий момент Md относительно вертикальной оси автомобиля.
Вращающий момент = сила x плечо действия силы.
Md = F x S
При отсутствии коррекции со стороны водителя (поворотом рулевого колеса) этот вращающий момент вызовет изменение направления движения автомобиля (автомобиль начнёт поворачивать вправо).
Этот момент направлен противоположно нежелательному «собственному» разворачивающему моменту автомобиля и стабилизирует его движение по заданному курсу.
Таким образом эффективно устраняется опасная недостаточная (рис.5.2.57) или избыточная (рис.5.2.58) поворачиваемость.
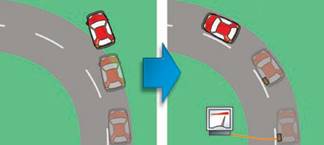
Рисунок 5.2.57 – Схема движения
автомобиля при недостаточной поворачиваемости
При
недостаточной поворачиваемости ESC предотвращает смещение
автомобиля к внешнему краю поворота дозированным подтормаживанием внутреннего
заднего колеса.

Рисунок 5.2.58 – Схема движения
автомобиля при избыточной поворачиваемости
При избыточной
поворачиваемости подтормаживается внешнее (по отношению к повороту) переднее
колесо.
Теперь рассмотрим подробнее характер движения автомобиля при объезде внезапно появившегося препятствия.
Автомобиль без ESC должен объехать внезапно появившееся на его полосе движения препятствие (рис.5.2.59).
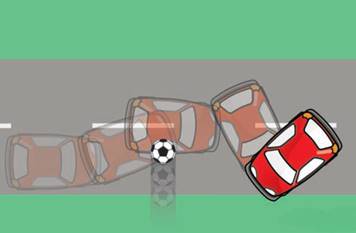
Рисунок 5.2.59 – Схема движения автомобиля при объезде препятствия без ESC
Водитель сначала резко поворачивает руль влево и сразу же после этого вправо. В результате такого сочетания манёвров автомобиль раскачивается и происходит занос задней оси. Водитель не в состоянии больше контролировать вращательное движение автомобиля относительно вертикальной оси. Автомобиль переходит в неуправляемый занос.
Автомобиль с ESC должен объехать внезапно появившееся на его полосе движения препятствие (рис.5.2.60). ESC распознаёт недостаточную поворачиваемость автомобиля при повороте влево и помогает ему войти в поворот дозированным подтормаживанием левого заднего колеса. Одновременно система, через шину данных CAN, снижает крутящий момент двигателя, чтобы дополнительно замедлить движение автомобиля за счёт торможения двигателем. В то время как автомобиль движется по левой дуге, водитель выворачивает руль вправо. Для поддержки такого изменения направления поворота система подтормаживает правое переднее колесо. Поскольку водитель хочет продолжить прямолинейное движение по своей первоначальной полосе, он теперь поворачивает руль влево. Резкая смена полосы движения может привести к «раскачиванию» автомобиля вокруг вертикальной оси. Чтобы предотвратить срывание задних колёс в занос, система подтормаживает левое переднее колесо.
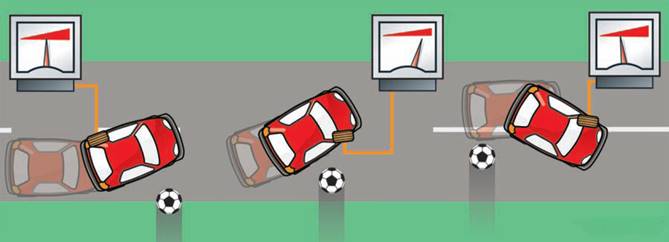
Рисунок 5.2.60 – Схема движения автомобиля при объезде препятствия с ESC
Основные компоненты системы ESC показаны на рисунке 5.2.61.
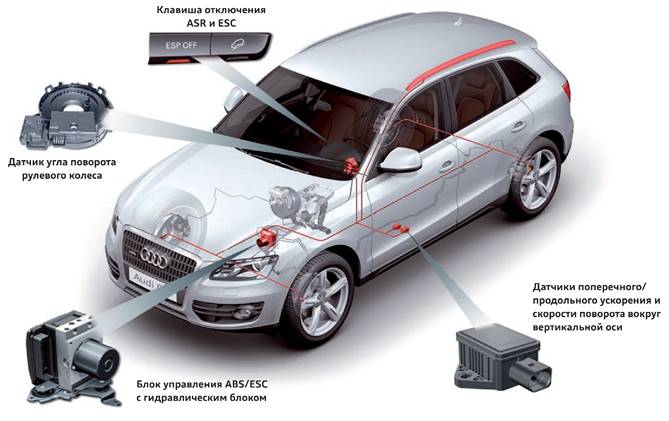
Рисунок 5.2.61 – Основные компоненты системы ESC
По сравнению с системой ABS с EDS в этом случае используется модифицированный гидравлический блок. Управляющее программное обеспечение для ESC и других соответствующих систем установлено центрально в одном блоке управления. Для работы функции ESC, помимо датчиков частоты вращения колёс, требуются дополнительные датчики, непосредственно регистрирующие движения (ускорения) автомобиля. Эти датчики регистрации ускорений автомобиля могут быть установлены также центрально или в блоке управления ABS/ESC, или в блоке управления электромеханического стояночного тормоза.
Дополнительно к ABS с EDS требуется также датчик, регистрирующий угол поворота рулевого колеса. Информация о состоянии системы передаётся водителю посредством контрольных ламп и индикации на дисплее. Водитель может отключать различные системы или переключать их настройки с помощью одного переключателя (клавиши) в зависимости от модели автомобиля.
По сравнению с гидравлическим блоком только для ABS/EDS для реализации функции ESC требуются дополнительные компоненты (рис.5.2.62). Электронная блокировка дифференциала EDS в состоянии автоматически создавать тормозное давление на ведущих колёсах. Функция поддержания курсовой устойчивости ESC должна быть в состоянии создавать тормозное давление на каждом из четырёх колёс автомобиля, в том числе и на автомобилях с передним приводом. Кроме того, в отличие от EDS впускные клапаны для насоса обратной подачи должны быть в состоянии переключаться и в условиях действия полного тормозного давления, созданного водителем. Это нужно потому, что в отличие от функции EDS функция ESC должна в соответствующих случаях работать и во время торможения.

Рисунок 5.2.62 - Схема гидравлических контуров ESC
При срабатывании во время торможения функция дополнительно повышает тормозное давление на соответствующем колесе по сравнению с давлением, задаваемым нажатием педали тормоза водителем. Поэтому в качестве впускных клапанов в гидравлическом блоке для ESC используются специальные клапаны высокого давления. Гидравлически три функции увеличения, удержания и уменьшения давления реализуются так же, как и при работе EDS. На выпускающихся в настоящее время автомобилях блок управления, как правило, конструктивно выполнен как один узел с гидравлическим блоком.
Программное обеспечение для работы функции поддержания курсовой устойчивости ESC установлено вместе с программным обеспечением для функций ABS, EBV, EDS и ASR в одном блоке управления.
Блок управления постоянно определяет и сравнивает между собой параметры требуемого (номинального) и фактического поведения автомобиля (рис.5.2.63). Когда разница между фактическими и номинальными параметрами превосходит определённые заданные значения, активируется функция ESC.

Рисунок 5.2.63 – Блок-схема работы системы ESC
Определение фактических характеристик движения автомобиля:
Анализируются измеряемые величины скорости поворота вокруг вертикальной оси, продольного и поперечного ускорения (рис.5.2.64).
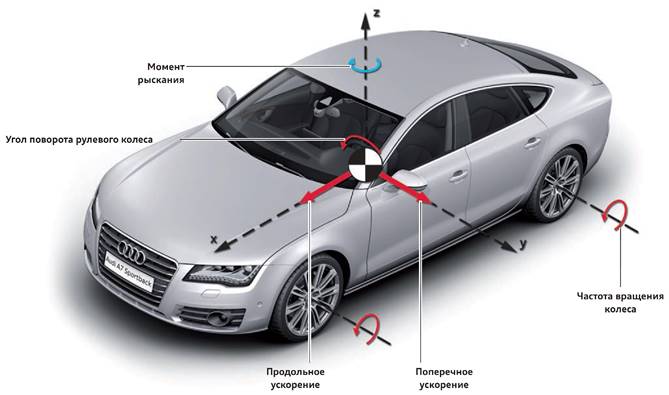
Рисунок 5.2.64 – Измеряемые параметры динамики автомобиля
По значениям, измеряемым датчиками частоты вращения колёс, определяются значения проскальзывания колёс, а также скорость движения автомобиля и его ускорение или замедление.
Датчик(и) тормозного давления сообщают информацию о текущем давлении в первичном контуре тормозной системы.
На автомобилях с автоматической коробкой передач, кроме того, блок управления ABS/ESC получает по шине данных информацию о включённой передаче.
Определение номинальных (требующихся) характеристик движения автомобиля:
Для определения параметров номинального движения автомобиля должны регистрироваться следующие действия водителя: поворот рулевого колеса, нажатие педали акселератора (ускорение/замедление) и торможение.
Измеряемое значение угла поворота рулевого колеса даёт информацию о выбираемом водителем направлении движения автомобиля.
Информация о нажатии педали акселератора водителем поступает в блок управления ABS/ESC по шине данных от блока управления двигателя.
Нажатие водителем педали тормоза блок управления регистрирует по сигналу выключателя стоп-сигналов.
Измеряемое значение давления в тормозной системе служит резервным сигналом, который затем используется также как основание для расчёта стабилизирующего использования тормозных механизмов функцией ESC.
В современных моделях, оснащаемых шиной данных FlexRay динамические параметры автомобиля регистрируются блоком управления датчиков системы регулирования динамики движения J849. Этот блок управления может устанавливаться в различных исполнениях в зависимости от комплектации автомобиля. В максимальной комплектации в его состав входят датчики продольных, поперечных и вертикальных ускорений, а также скорости поворота автомобиля относительно всех трёх пространственных осей, x, y и z. Для работы функции ESC требуются сигналы поперечного и продольного ускорения, а также скорости поворота вокруг вертикальной оси.